
目录
快速导航-
创刊60周年纪念专刊 | 精确制导武器智能化若干问题思考
创刊60周年纪念专刊 | 精确制导武器智能化若干问题思考
-
创刊60周年纪念专刊 | 飞行器博弈制导进程与展望
创刊60周年纪念专刊 | 飞行器博弈制导进程与展望
-
创刊60周年纪念专刊 | 电磁目标表征: 知识-数据联合驱动新范式
创刊60周年纪念专刊 | 电磁目标表征: 知识-数据联合驱动新范式
-
创刊60周年纪念专刊 | 空战目标轨迹预测技术研究综述
创刊60周年纪念专刊 | 空战目标轨迹预测技术研究综述
-
创刊60周年纪念专刊 | 美制ADM-160“微型空射诱饵”在俄乌冲突中的实战使用情况研究
创刊60周年纪念专刊 | 美制ADM-160“微型空射诱饵”在俄乌冲突中的实战使用情况研究
-
创刊60周年纪念专刊 | 美军强对抗环境远域介入空空作战构想分析
创刊60周年纪念专刊 | 美军强对抗环境远域介入空空作战构想分析
-
创刊60周年纪念专刊 | 旋转爆轰发动机内煤粉-氢气两相爆轰流场数值研究
创刊60周年纪念专刊 | 旋转爆轰发动机内煤粉-氢气两相爆轰流场数值研究
-
创刊60周年纪念专刊 | 鸭舵转速对双旋弹追随稳定性影响研究
创刊60周年纪念专刊 | 鸭舵转速对双旋弹追随稳定性影响研究
-
创刊60周年纪念专刊 | 基于距离及相对角度信息的多智能体系统刚性编队任务规划
创刊60周年纪念专刊 | 基于距离及相对角度信息的多智能体系统刚性编队任务规划
-
创刊60周年纪念专刊 | 面向可打击区域的高超声速飞行器制导控制一体化方法研究
创刊60周年纪念专刊 | 面向可打击区域的高超声速飞行器制导控制一体化方法研究
-
创刊60周年纪念专刊 | 吸气式高超声速机动飞行样式及其关键技术分析
创刊60周年纪念专刊 | 吸气式高超声速机动飞行样式及其关键技术分析
-
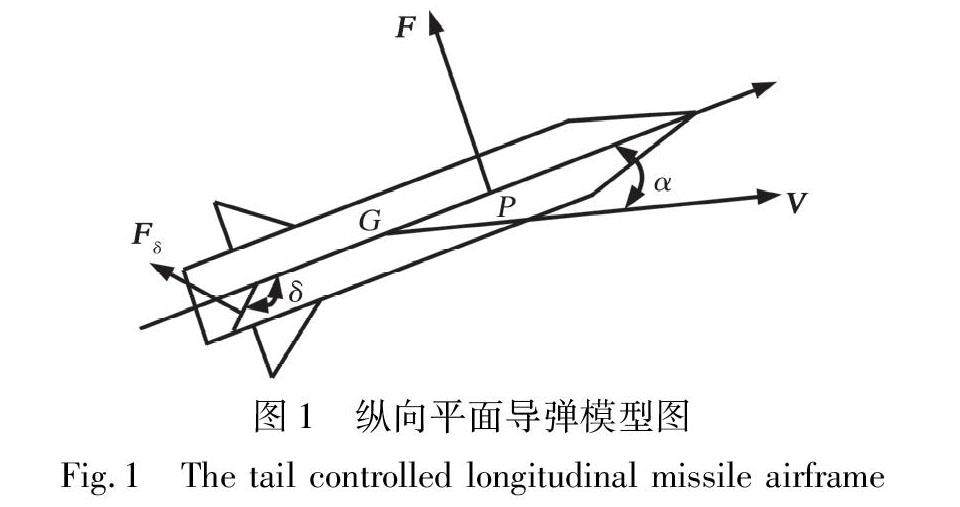
创刊60周年纪念专刊 | 基于对数型障碍Lyapunov函数的俯仰驾驶仪设计
创刊60周年纪念专刊 | 基于对数型障碍Lyapunov函数的俯仰驾驶仪设计
-
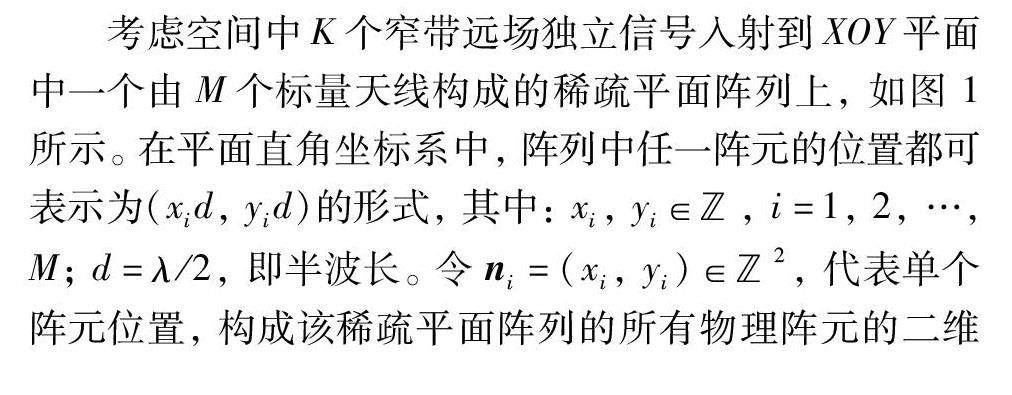
创刊60周年纪念专刊 | 阵元失效下稀疏阵列的二维DOA估计算法
创刊60周年纪念专刊 | 阵元失效下稀疏阵列的二维DOA估计算法
-
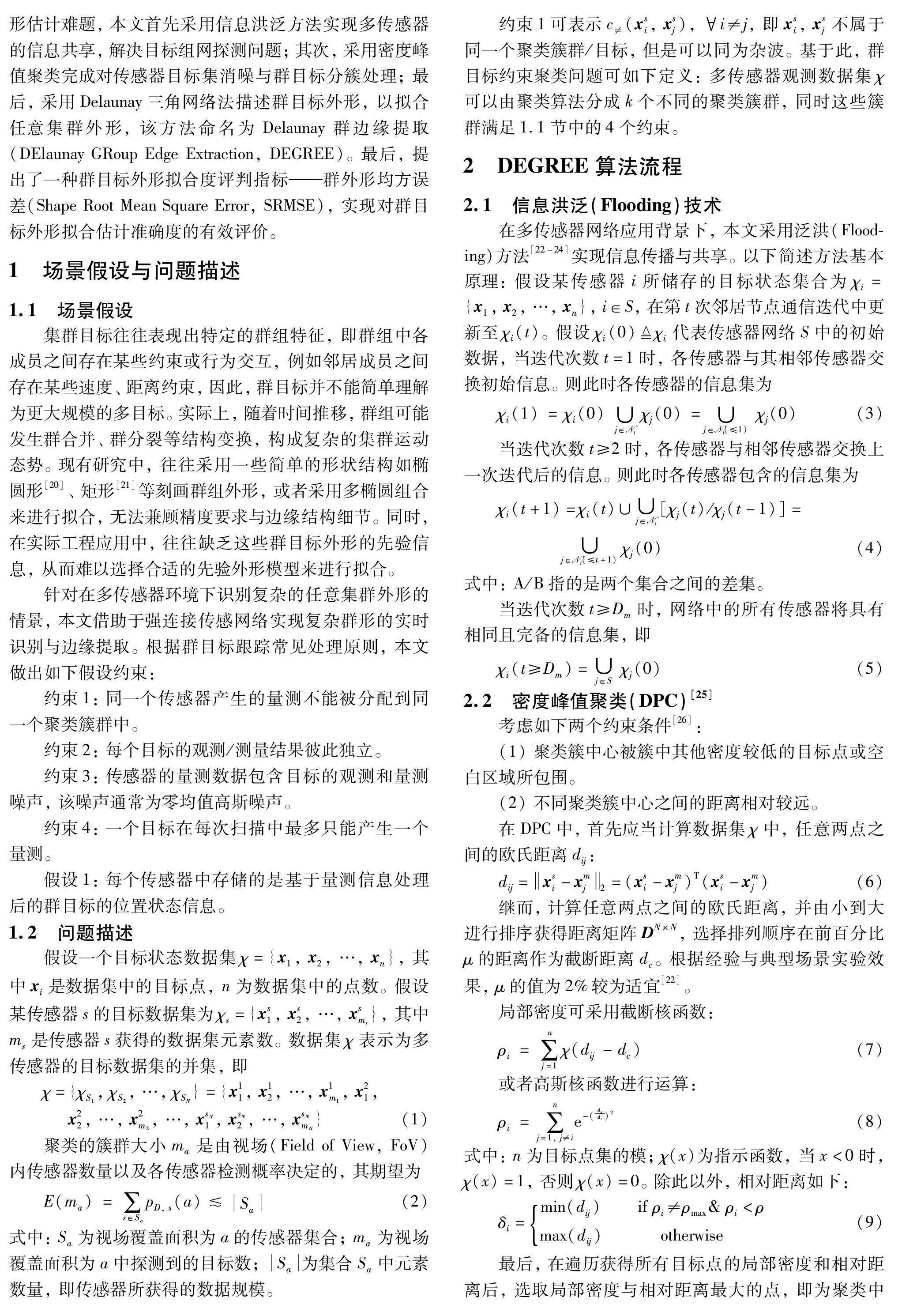
创刊60周年纪念专刊 | DEGREE: 一种基于Delaunay三角的任意群目标外形识别方法
创刊60周年纪念专刊 | DEGREE: 一种基于Delaunay三角的任意群目标外形识别方法
-

创刊60周年纪念专刊 | 针对组网雷达的无人机集群转发式欺骗干扰时延误差研究
创刊60周年纪念专刊 | 针对组网雷达的无人机集群转发式欺骗干扰时延误差研究
-
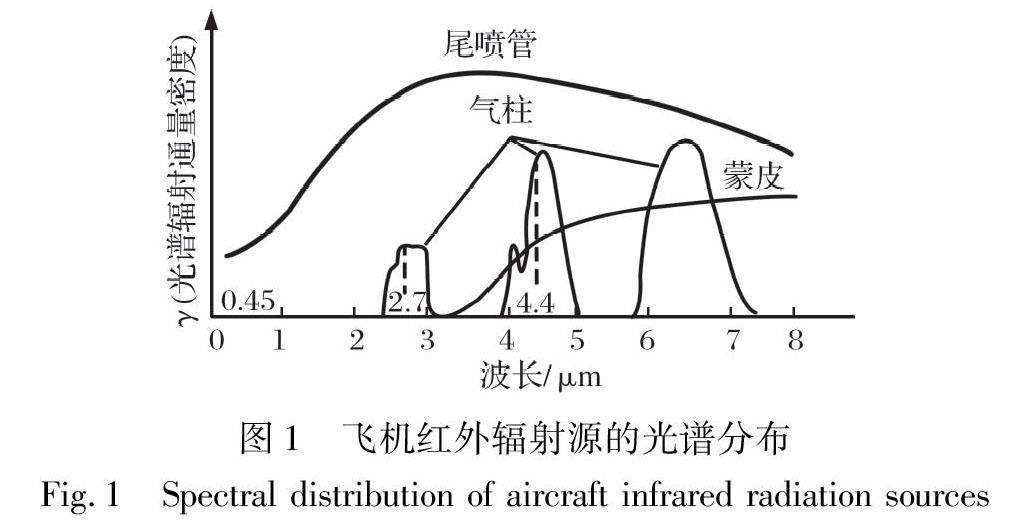
创刊60周年纪念专刊 | 红外成像导引头对隐身飞机探测性能提升途径分析
创刊60周年纪念专刊 | 红外成像导引头对隐身飞机探测性能提升途径分析
-
简讯 | 最新型空空导弹开始装备俄军
简讯 | 最新型空空导弹开始装备俄军










 登录
登录